Control
de disparo de un Triac
Material:
1 Transformador 24v @ 1A
4 Diodos 1N4004
4 Diodos 1N4148
2 Cap. 470uF
2 Cap. 330nF
1 Cap.
150nF
3 Cap.
100nF
2 Cap.
47nF
1 LM7812
1
LM7912
5 Res.
2.2K @ 1/2w
4 Res.
4.7K @ 1/2w
2 LM741
2 BC547
1 Potenciómetro 50K @ 1/2w
1 NE555
1 4070
1 4071
1 4081
Teoría.
El TRIAC (triode AC conductor)
es un semiconductor capaz de bloquear tensión y conducir corriente en ambos
sentidos entre los terminales principales T1 y T2. Su estructura básica y
símbolo aparecen en la fig.8. Es un componente simétrico en cuanto a conducción
y estado de bloqueo se refiere, pues la característica en el cuadrante I de la
curva UT2-T1 --- iT2 es igual a la del cuadrante III. Tiene unas fugas en
bloqueo y una caída de tensión en conducción prácticamente iguales a las de un
tiristor y el hecho de que entre en conducción, si se supera la tensión de
ruptura en cualquier sentido, lo hace inmune a destrucción por sobretensión
 Fundamentalmente es un Diac con
una terminal de compuerta, es decir, actúa como dos SCR en paralelo. Por eso,
el Triac puede controlar la corriente en cualquier dirección.
Fundamentalmente es un Diac con
una terminal de compuerta, es decir, actúa como dos SCR en paralelo. Por eso,
el Triac puede controlar la corriente en cualquier dirección. Las características del Triac
en el 1er. Y 3er. Cuadrantes, son diferentes a las del Diac, la corriente de
sostenimiento en cada dirección no está presente en las características del
Diac.
Las características del Triac
en el 1er. Y 3er. Cuadrantes, son diferentes a las del Diac, la corriente de
sostenimiento en cada dirección no está presente en las características del
Diac.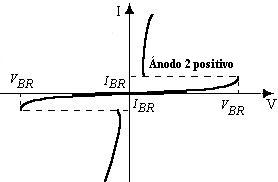 El voltaje de rompimiento a
saturación es generalmente alto, así que la forma común de encender un Triac es
aplicando un disparo de polarización directa.
El voltaje de rompimiento a
saturación es generalmente alto, así que la forma común de encender un Triac es
aplicando un disparo de polarización directa.
Si v tiene
la polarización mostrada, tenemos que aplicar un disparo positivo; esto cierra
el cerrojo izquierdo.
Cuando tiene la polaridad
opuesta, un disparo negativo es necesario, cerrando el cerrojo de la derecha
Se puede considerar a un TRIAC
como si fueran dos SCR conectados en antiparalelo, con una conexión de
compuerta común, como se muestra en el ejercicio siguiente.
 Dado que el TRIAC es un
dispositivo bidireccional, no es posible identificar sus terminales como ánodo
y cátodo. Si la terminal MT2 es positiva con respecto a la terminal MT1, se
activará al aplicar una señal negativa a la compuerta, entre la compuerta y la
terminal MT1.
Dado que el TRIAC es un
dispositivo bidireccional, no es posible identificar sus terminales como ánodo
y cátodo. Si la terminal MT2 es positiva con respecto a la terminal MT1, se
activará al aplicar una señal negativa a la compuerta, entre la compuerta y la
terminal MT1.
No es necesario que estén
presentes ambas polaridades en las señales de la compuerta y un TRIAC puede ser
activado con una sola señal positiva o negativa de compuerta. En la práctica,
la sensibilidad varía de un cuadrante a otro, el TRIAC normalmente se opera en
el cuadrante I (voltaje y corriente de compuerta positivos) o en el cuadrante
III (voltaje y corriente de compuerta negativos).
Desarrollo

La primera parte de éste circuito
consta de una fuente simétrica regulada de ±12v, que servirá para alimentar los
circuitos empleados para la sincronización y control de disparo del TRIAC, cuya
función será controlar la parte de potencia en CA. Éste circuito no tiene mayor
complicación que cualquier fuente de alimentación simétrica fija.
__________________________________________________________________________________
__________________________________________________________________________________

La segunda parte consta de un
recortador que utiliza la caída de tensión de dos diodos contrapuestos en
paralelo para obtener una señal alterna de ±0.7v (V2) de la misma frecuencia de
la señal a controlar por lo que la tomaremos directamente del transformador en
la parte de baja tensión (Vca), que nos servirá como referencia y disparo en la
siguiente etapa. (Nota: Idealmente un
diodo polarizado de manera directa no tiene caída de tensión puesto que su
resistencia debería ser cero, pero en la vida real los diodos tienen una caída de
tensión de aproximadamente 0.7v, cualidad que aprovecharemos en ésta aplicación.)
____________________________________________________________________________________________
____________________________________________________________________________________________

Ahora utilizaremos (V2) en dos
amplificadores operacionales que utilizamos como comparadores, en el primero en
la entrada no inversora y en el otro en la inversora, con esto obtendremos dos
señales (V3, Vc), con las siguientes características: son alternas (±12v), son
simétricas entre sí y además tienen la misma frecuencia de (Vca) (60/50Hz).
_____________________________________________________________________________________________
_____________________________________________________________________________________________

Ahora utilizaremos (V2) en dos
amplificadores operacionales que utilizamos como comparadores, en el primero en
la entrada no inversora y en el otro en la inversora, con esto obtendremos dos
señales (V3, Vc), con las siguientes características: son alternas (±12v), son
simétricas entre sí y además tienen la misma frecuencia de (Vca) (60/50Hz).
______________________________________________________________________________________________
______________________________________________________________________________________________

Posteriormente se utiliza un
segundo recortador que elimina la parte negativa de las señales cuadradas (V4, Vd)(Una vez más se utiliza la caída de tensión en
los diodos por lo que la señal tiene una pequeña parte negativa).
__________________________________________________________________________________________

__________________________________________________________________________________________
Las señales cuadradas obtenidas
se adecuan en una red RC que entrega una señal de pulsos en picos de tensión. Los
pulsos de la etapa anterior se emplean en el disparo de dos transistores en
configuración OR, es decir unidos por el colector, en cuya salida obtendremos
una señal de disparo para un oscilador monoestable que será el que se encargue
de variar el momento de disparo del controlador.

Por último se tiene un circuito
lógico con CMOS, que se encargará de disparar el TRIAC en las condiciones
requeridas, que será cuando V7 (el momento de disparo) este en estado alto, y
se cumpla cada medio ciclo dicho disparo, esto se logra gracias a los
amplificadores de los que se obtiene Vc y Vd que son respectivamente las partes
positiva y negativa (invertida para lograr la condición requerida) del ciclo de
corriente alterna.

V7
|
V3
|
Vc
|
V7
V3
|
V7
Vc
|
(V7
V3)V3
|
(V7
Vc)Vc
|
((V7
V3)V3)+(
(V7
Vc)Vc)
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
1
|
0
|
1
|
0
|
1
|
1
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
1
|
0
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
1
|
0
|
0
|
1
|
1
|
0
|
0
|
0
|
1
|
0
|
1
|
1
|
0
|
0
|
0
|
0
|
1
|
1
|
0
|
0
|
1
|
0
|
0
|
0
|
1
|
1
|
1
|
0
|
0
|
0
|
0
|
0
|
_________________________________________________________________________________
Por último el circuito de
control se acopla al circuito de potencia compartiendo la tierra con la
terminal T2 del Triac
 | ||||
| El conjunto formado por D5 y D6 simula un TRIAC |





El circuito está comprobado, espero te sea de utilidad, si tienes alguna duda o sugerencia comunicanoslo y lo resolveremos a la brevedad posible.













